Message Ballの完成で、曲がりなりにもRCXのIR Portの入力感度を相対的に測定できる様になりました。実際やってみるを今まで考えていたのと違い、LCD表示器がついた面のほうが感度が良いことに気付きました。そうなると、どんな指向性を持っているのか、可視化したくなりませんか?
そこはMindStormsです。測定システムを作ることができます。どうせ、なら自動測定させたいですね。やってみましょう。
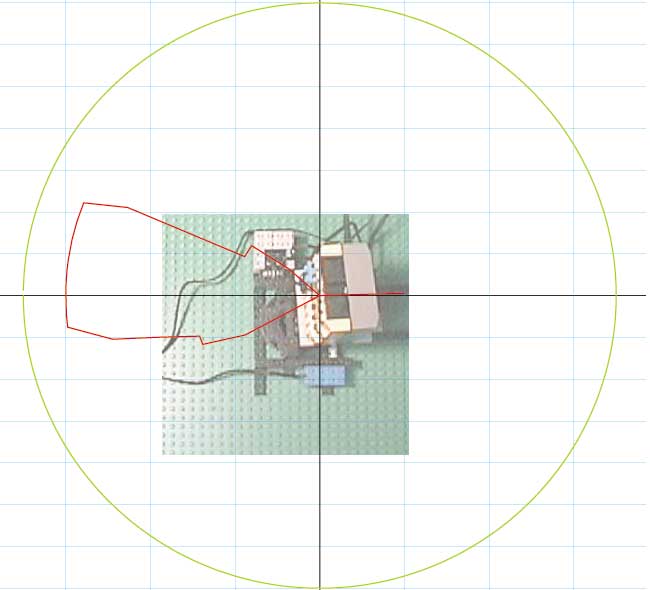
大型ターンテーブルに測定ステージをつけ、ここにRCXを載せて回転するメカです。テーブルはウォームギヤで回転し、このウォーム軸に角度センサーをつけました。モーター軸とは、チェーンで伝導してます。
![]()
非測定物のRCX自体にNQCでプログラムし、ターンテーブルの制御と測定値のロギングを行わせることにします。
プログラムはここにおきます。

システムができれば、後はセッティングしてRUNするだけです。ギア比がいまいちで、テーブル回転を比例制御で行っているのに、ぎこちない動きですが、1周約90秒で90点もサンプリングしますから、勘弁してもらいましょう(^^;
各測定ともMessage Ballは台に載せ発光部がおおよそ受光部と同じ面に来る様にしています。
まず、表示面を上にして回転します。この方向は感度が低くMessage Ball中心と、回転軸中心間距離を150mmにしました。かなりブロードな指向性です。

RCXを立てて測定しました。距離は300mmにしています。感度が高いだけでなく、指向性がずいぶんシャープになってます。
確認の意味で、横倒しにしてみました。この指向性特性は特に重要です。立てて使う場合、対象物を見上げる方向でないと、感度が低いことを示しています。ですから、床に置いたMessage Ballを探索するロボットを作るなら、上下を逆さに立てるか、表示面を下向きに前かがみの姿勢が、感度的には良好と言うことになります。(造形的には辛いものがありますが)

Copyright © 2003 