 |
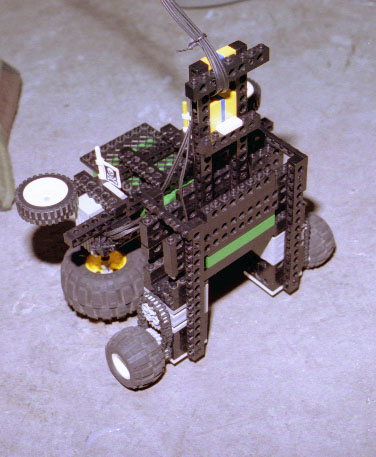
かなりシンプルなマシンですが、頑丈にできてます。移動は、チェイン駆動された前輪で行い、ピンポン球を後部の水平に高速回転する2個のタイヤ(ボール駆動軸)ではさんで加速し、前の門状になった部分から発射します。
上部についているタイヤや出っ張りは、バンパーで壁に水平タイヤが接触するのを防止します。でも、当日現地で調整したため、競技フィールドのアクリルの壁に、たくさんキスマークをつけてしまいました。済みません。 |
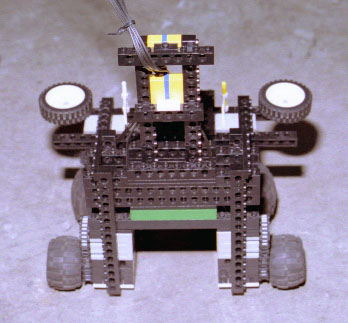 |
これが前面です。緑色の部分は、赤いバケツに入っていた厚い基礎板で、これがシャーシの役割になっています。初めモーターと駆動輪は直結でしたが、開口部を広げ、強度を上げるためにこのように変更されました。
設計、組み立てはすべてdaichiXが、実施しました。私は、ここは弱いぞ、モーターは上にしろと、いい加減なアドバイスをしましたが... |
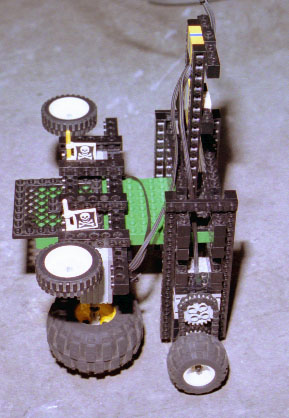 |
右側面です。現地で、試し撃ちすると、球の勢いが強すぎ、打った球がほぼ100%相手陣地の後ろのアクリル壁で跳ね返り、自陣地に戻ってくることが判明しました。自宅に、競技フィールドを作って試験したのですが、予算とスペースの関係上、半分だけ、自分の陣地分だけにしたので、相手陣地からの跳ね返りは見ていなかったのでした。これには、焦りました。電源は、電池ケース直結のリモコンなので、パワー制御ができないのです。
急遽、vll実験用に用意してあったRCXに置き換え、プログラムで出力を絞り、切り抜けました。(おかげでNQC VLLのデモは割愛させていただきました)
会場で見た方はお気づきと思いますが、daichiXは、競技フィールドの横に立って操縦してます。あれは、練習用競技フィールドが壁にくっついていて、真後ろに立てない構造だからで、あの位置からでないとうまく操作できないからだそうです。 |
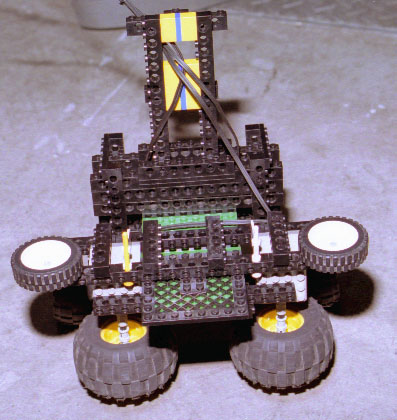 |
焦ったのは、これだけではありません。マシンは構想からほぼ2週間で、現在の形になり、最後の1週間は、細かい改良をしながら、操縦練習をしたのですが、そのため、部品が磨耗し、モーターとボール駆動軸を直結しているジョイントが、ガバガバになり、外れてしまうのに気がつかなかったのです。予備部品を、持っていくのを忘れました。一瞬あきらめの境地でしたが、会場内にシトラスさんの出店が...(^^)
直ちに、リペアパーツを買って、交換しました。やっぱり新品部品は違いますね。シトラスさん、感謝です。あそこにお店を出していなかったら多分、一回戦で敗退してました。 |